强化学习基本框架
想象一下,你正在教一只小狗学习坐下这个指令。你不会直接告诉它坐下这个动作的每一个肌肉该如何运动,而是会这样做:
- 你发出坐下的口令。
- 小狗尝试做出某个动作(可能是坐下,也可能是趴下或转圈)。
- 如果它坐下了,你立刻给它一块零食作为奖励。
- 如果它做错了,你就不给奖励,或者发出一个轻微的不对的信号。
- 经过多次尝试,小狗会逐渐明白:听到坐下后做出坐下的动作,就能获得零食。于是它学会了这个指令。
强化学习 就是让计算机(或智能体)像这只小狗一样,通过与环境互动、根据获得的奖励或惩罚来学习如何做出一系列决策,以达成某个长期目标。
它与我们熟悉的监督学习(有标准答案的"老师")和无监督学习(寻找数据内在结构)有本质区别。强化学习是从经验中学习,核心是试错与延迟奖励。
强化学习的核心要素
为了形式化地描述这个学习过程,我们引入几个核心概念,它们共同构成了强化学习的基本框架。
智能体与环境
这是强化学习中最基本的一对互动关系。
- 智能体: 就是学习的主体,是做出决策的实体。在上面的例子中,小狗就是智能体。在计算机中,它可以是一个算法、一个程序或一个机器人。
- 环境: 是智能体所处的外部世界,智能体与之互动。对于小狗来说,环境就是你、零食、地板等一切外部事物。环境会接收智能体的动作,并给出新的状态和奖励。
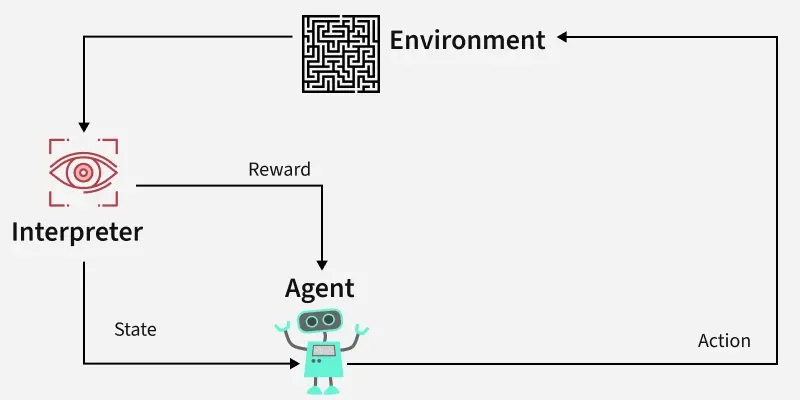
它们的关系是一个持续的循环:智能体观察环境 -> 做出动作 -> 环境反馈新的状态和奖励 -> 智能体再次观察...
状态、动作与奖励
这是描述每一次互动的三个关键信息。
- 状态: 在某个时刻,环境情况的完整描述。比如,在教小狗的例子中,状态可能包括:小狗是站着的、你手里有零食、你刚说了坐下。状态是智能体做决策的依据。
- 动作: 智能体在某个状态下可以做出的选择。对于小狗,动作集合可能是 {坐下, 趴下, 站立, 转圈...}。
- 奖励: 环境在智能体执行一个动作后,反馈给智能体的一个标量信号。它定义了什么是好,什么是坏。奖励是智能体学习的唯一指南针。给小狗零食就是正奖励 (+1),说不对可以看作是轻微的负奖励 (-0.1)。
策略
策略 是智能体的大脑或行为准则。它定义了在任意给定状态下,智能体应该采取哪个动作。
策略可以是一个简单的查表函数,也可以是一个复杂的深度神经网络。强化学习的终极目标,就是找到一个最优策略,使得智能体从环境中获得的长期累积奖励最大化。
- 示例: 一个简单的策略可能是:如果状态是听到坐下指令,那么以 90% 的概率选择坐下动作,以 10% 的概率选择其他动作。
价值函数
奖励告诉智能体当前动作的即时好坏,但智能体更需要关心长期收益。价值函数 就是用来衡量这个长期收益的工具。
它回答的问题是:从当前状态开始,一直遵循某个策略走下去,我预期能获得的总奖励是多少?
- 状态价值函数 V(s): 衡量在状态
s下,遵循当前策略的长期价值。 - 动作价值函数 Q(s, a): 衡量在状态
s下,执行特定动作a后,再遵循当前策略的长期价值。它比状态价值函数更常用,因为它能直接指导动作选择。
为什么需要价值函数? 想象一个象棋游戏。吃掉对方一个兵会得到即时的小奖励,但可能导致十步之后被"将死"而获得巨大的负奖励。价值函数通过计算和预估,能帮助智能体避免这种贪图小利而输掉全局的行为。
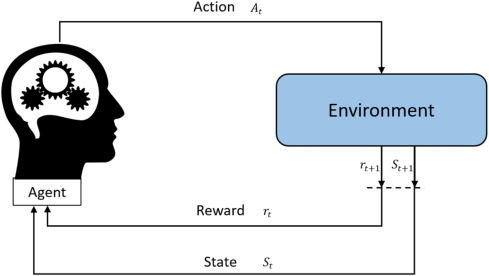
核心互动流程:马尔可夫决策过程
强化学习问题通常被建模为 马尔可夫决策过程。这个名字听起来复杂,但其实它只是将我们上面提到的要素用数学形式组织起来,描述智能体与环境互动的一个标准框架。
MDP 的核心思想是:下一个状态和奖励只取决于当前状态和当前采取的动作,与之前的历史无关(即马尔可夫性)。
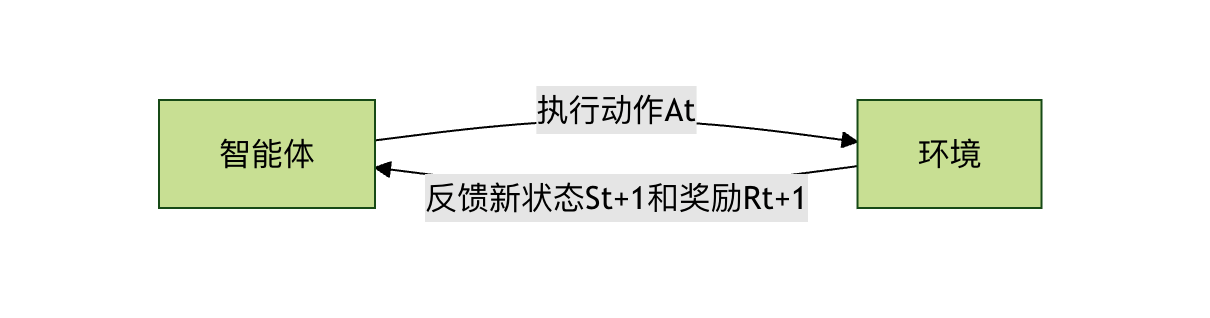
一次完整的 MDP 交互周期如下:
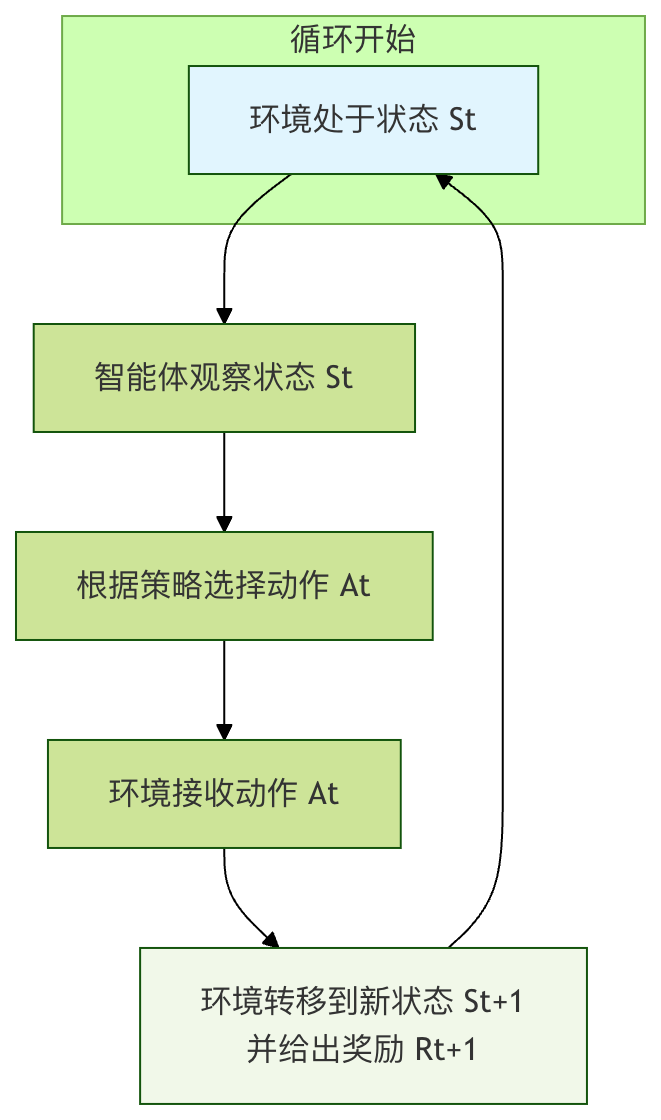
- 在时刻
t,环境处于状态S_t。 - 智能体观察到这个状态。
- 智能体根据其策略
π,选择一个动作A_t。 - 环境接收到这个动作。
- 环境根据其内在的动态规律,转移到下一个状态
S_{t+1},并产生一个标量奖励R_{t+1},反馈给智能体。 - 时间步前进 (
t = t+1),新的循环开始。
智能体的目标,就是通过不断经历这个循环,学习到一个策略 π*,使得从任意初始状态开始,获得的累积奖励的期望值(即回报)最大化。
一个简单代码示例:网格世界
让我们用一个经典的网格世界例子来具体化这些概念。假设有一个 4x4 的网格,智能体从起点 S 出发,目标是到达终点 G。走到障碍物 # 会失败,每走一步都有一个小惩罚(鼓励尽快到达终点)。
S . . . . # . . . . # . . . . G
- 状态: 每个网格的坐标,如 (0,0), (0,1)... (3,3)。共 16 个状态。
- 动作: {上, 下, 左, 右}。
- 奖励:
- 到达
G: +10 - 碰到
#或走出边界: -5 - 其他普通移动: -0.1 (鼓励高效路径)
- 到达
- 策略: 我们需要学习一个表格,记录在每个状态(格子)下,应该朝哪个方向走。
下面是一个极度简化的 Q-learning(一种经典强化学习算法)的伪代码演示,用于学习这个网格世界的最优路径。
实例
import random
from typing import Dict, List, Tuple
# ====================== 1. 环境模拟(网格世界) ======================
class GridWorldEnv:
"""简单的网格世界环境,用于演示Q-Learning"""
def __init__(self, grid_size: Tuple[int, int] = (5, 5),
start_pos: Tuple[int, int] = (0, 0),
goal_pos: Tuple[int, int] = (4, 4),
obstacle_pos: List[Tuple[int, int]] = [(1, 1), (2, 2), (3, 1)]):
self.grid_size = grid_size
self.start_pos = start_pos
self.goal_pos = goal_pos
self.obstacle_pos = obstacle_pos
self.current_pos = start_pos
# 动作定义:0-上, 1-下, 2-左, 3-右
self.actions = ['up', 'down', 'left', 'right']
self.num_actions = len(self.actions)
def reset(self) -> int:
"""重置环境,返回初始状态的索引"""
self.current_pos = self.start_pos
return self.pos_to_state(self.current_pos)
def pos_to_state(self, pos: Tuple[int, int]) -> int:
"""将坐标位置转换为状态索引"""
return pos[0] * self.grid_size[1] + pos[1]
def state_to_pos(self, state: int) -> Tuple[int, int]:
"""将状态索引转换为坐标位置"""
return (state // self.grid_size[1], state % self.grid_size[1])
def random_action(self) -> int:
"""随机选择一个动作(探索)"""
return random.randint(0, self.num_actions - 1)
def action_to_direction(self, action: int) -> str:
"""将动作索引转换为方向名称"""
return self.actions[action]
def step(self, action: int) -> Tuple[int, float, bool]:
"""
执行动作,返回(next_state, reward, done)
"""
x, y = self.current_pos
# 根据动作更新位置
if action == 0: # 上
x = max(0, x - 1)
elif action == 1: # 下
x = min(self.grid_size[0] - 1, x + 1)
elif action == 2: # 左
y = max(0, y - 1)
elif action == 3: # 右
y = min(self.grid_size[1] - 1, y + 1)
# 检查是否碰到障碍物
new_pos = (x, y)
if new_pos in self.obstacle_pos:
new_pos = self.current_pos # 碰到障碍物,位置不变
self.current_pos = new_pos
next_state = self.pos_to_state(new_pos)
# 计算奖励
if new_pos == self.goal_pos:
reward = 100.0 # 到达终点,大奖励
done = True
elif new_pos in self.obstacle_pos:
reward = -50.0 # 碰到障碍物,惩罚
done = False
else:
reward = -1.0 # 每走一步小惩罚,鼓励尽快到达终点
done = False
return next_state, reward, done
# ====================== 2. Q-Learning 主程序 ======================
if __name__ == "__main__":
# 初始化环境
env = GridWorldEnv(
grid_size=(5, 5), # 5x5网格
start_pos=(0, 0), # 起点
goal_pos=(4, 4), # 终点
obstacle_pos=[(1,1), (2,2), (3,1)] # 障碍物位置
)
# 计算状态数量
num_states = env.grid_size[0] * env.grid_size[1]
num_actions = env.num_actions
# 初始化Q表(动作价值函数),形状为 [状态数量,动作数量]
Q_table = np.zeros([num_states, num_actions])
# 定义超参数
learning_rate = 0.1 # 学习率
discount_factor = 0.9 # 折扣因子
epsilon = 0.1 # 探索率
total_episodes = 1000 # 训练轮数
# 训练过程
for episode in range(total_episodes):
state = env.reset() # 重置环境到起点,获取初始状态 S
done = False # 标记本轮是否结束
total_reward = 0 # 记录本轮总奖励
while not done:
# 1. ε-贪婪策略选择动作
if random.uniform(0, 1) < epsilon:
action = env.random_action() # 探索:随机选动作
else:
# 利用:选Q值最高的动作,处理平局情况
q_values = Q_table[state]
max_q = np.max(q_values)
best_actions = np.where(q_values == max_q)[0]
action = random.choice(best_actions) # 平局时随机选一个
# 2. 执行动作,与环境交互
next_state, reward, done = env.step(action)
total_reward += reward
# 3. 更新Q表(核心:Q-Learning公式)
# Q(S, A) = Q(S, A) + α * [ R + γ * max(Q(S', a')) - Q(S, A) ]
old_value = Q_table[state, action]
next_max = np.max(Q_table[next_state]) # 下一状态的最大Q值
# 计算目标Q值
target = reward + discount_factor * next_max
# 更新Q值
new_value = old_value + learning_rate * (target - old_value)
Q_table[state, action] = new_value
# 4. 进入下一个状态
state = next_state
# 每100轮打印一次训练进度
if (episode + 1) % 100 == 0:
print(f"Episode {episode + 1}/{total_episodes}, Total Reward: {total_reward:.1f}")
# ====================== 3. 提取最优策略 ======================
policy: Dict[int, str] = {}
print("\n=== 学习完成后的最优策略 ===")
for s in range(num_states):
best_action_idx = np.argmax(Q_table[s])
best_action = env.action_to_direction(best_action_idx)
policy[s] = best_action
# 打印每个状态的最优动作(按网格位置)
pos = env.state_to_pos(s)
if pos in env.obstacle_pos:
action_str = "障碍物"
elif pos == env.goal_pos:
action_str = "终点"
else:
action_str = best_action
print(f"位置 {pos}: 最优动作 = {action_str}")
# ====================== 4. 测试最优策略 ======================
print("\n=== 测试最优策略 ===")
state = env.reset()
done = False
steps = 0
path = [env.state_to_pos(state)]
while not done and steps < 50: # 最多50步,防止无限循环
best_action_idx = np.argmax(Q_table[state])
next_state, reward, done = env.step(best_action_idx)
path.append(env.state_to_pos(next_state))
state = next_state
steps += 1
print(f"路径: {path}")
print(f"到达终点步数: {steps}")
print(f"是否到达终点: {env.current_pos == env.goal_pos}")
代码解析:
Q_table是核心的动作价值函数,形状为[状态数量,动作数量](示例中为25×4,对应5×5网格的25个状态、上下左右4个动作)。Q_table[s, a]代表在状态s(网格位置的索引)下执行动作a(0-3对应上下左右)的长期价值,初始值全为0,通过训练逐步更新。env.step(action)模拟马尔可夫决策过程(MDP)的核心交互逻辑:输入动作索引后,先更新智能体的网格位置(碰到障碍物则位置不变),再返回三元组(next_state, reward, done)——next_state是新状态的索引,reward是差异化奖励(终点+100、障碍物-50、每步-1),done标记是否到达终点(本轮结束)。- Q-Learning 的核心更新公式
Q(S,A) = Q(S,A) + α * [R + γ * max(Q(S', a')) - Q(S,A)]在代码中被拆解实现:先获取当前Q值old_value,再计算下一状态的最大Q值next_max,接着算出目标价值target = 奖励 + 折扣因子 × 下一状态最大Q值,最后用学习率α混合旧值与目标值,得到更新后的Q值,实现对动作价值的迭代修正。 epsilon(探索率)通过ε-贪婪策略平衡"利用"与"探索":以epsilon概率随机选动作(探索未知),以1-epsilon概率选当前状态下Q值最大的动作(利用已知最优);代码还优化了Q值平局的情况——若多个动作Q值相同,随机选择其一,避免单一选择导致的策略固化。- 代码额外实现了状态与网格位置的双向映射(
pos_to_state/state_to_pos)、动作与方向名称的转换(action_to_direction),以及训练后的策略提取与测试:遍历所有状态,取每个状态下Q值最大的动作作为最优策略,并验证该策略从起点到终点的路径与步数。
Episode 100/1000, Total Reward: 93.0 Episode 200/1000, Total Reward: 90.0 Episode 300/1000, Total Reward: 92.0 Episode 400/1000, Total Reward: 90.0 Episode 500/1000, Total Reward: 93.0 Episode 600/1000, Total Reward: 93.0 Episode 700/1000, Total Reward: 91.0 Episode 800/1000, Total Reward: 93.0 Episode 900/1000, Total Reward: 93.0 Episode 1000/1000, Total Reward: 93.0 === 学习完成后的最优策略 === 位置 (0, 0): 最优动作 = right 位置 (0, 1): 最优动作 = right 位置 (0, 2): 最优动作 = down 位置 (0, 3): 最优动作 = down 位置 (0, 4): 最优动作 = down 位置 (1, 0): 最优动作 = up 位置 (1, 1): 最优动作 = 障碍物 位置 (1, 2): 最优动作 = right 位置 (1, 3): 最优动作 = down 位置 (1, 4): 最优动作 = left 位置 (2, 0): 最优动作 = down 位置 (2, 1): 最优动作 = down 位置 (2, 2): 最优动作 = 障碍物 位置 (2, 3): 最优动作 = down 位置 (2, 4): 最优动作 = down 位置 (3, 0): 最优动作 = down 位置 (3, 1): 最优动作 = 障碍物 位置 (3, 2): 最优动作 = right 位置 (3, 3): 最优动作 = right 位置 (3, 4): 最优动作 = down 位置 (4, 0): 最优动作 = right 位置 (4, 1): 最优动作 = right 位置 (4, 2): 最优动作 = right 位置 (4, 3): 最优动作 = right 位置 (4, 4): 最优动作 = 终点 === 测试最优策略 === 路径: [(0, 0), (0, 1), (0, 2), (1, 2), (1, 3), (2, 3), (3, 3), (3, 4), (4, 4)] 到达终点步数: 8 是否到达终点: True
总结与实践思考
强化学习的基本框架可以总结为:智能体通过与环境进行马尔可夫决策过程式的交互,根据获得的奖励信号,不断优化其策略(通常通过学习和更新价值函数来实现),最终目标是最大化长期累积奖励。
| 概念 | 类比 | 在强化学习中的作用 |
|---|---|---|
| 智能体 | 学习的小狗/下棋的AI | 决策主体,执行学习的算法 |
| 环境 | 训练师/棋盘规则 | 提供状态和奖励反馈的外部系统 |
| 状态 | 小狗的姿势/棋盘局面 | 智能体做决策的当前信息依据 |
| 动作 | 坐下/移动棋子 | 智能体可以做出的选择 |
| 奖励 | 零食/输赢结果 | 评价动作好坏的即时信号,学习指南针 |
| 策略 | 小狗学会的指令反应 | 从状态到动作的映射规则,学习的目标 |
| 价值函数 | 对局势的长期判断 | 评估状态或动作的长期价值,是策略优化的基础 |

点我分享笔记